

watch on
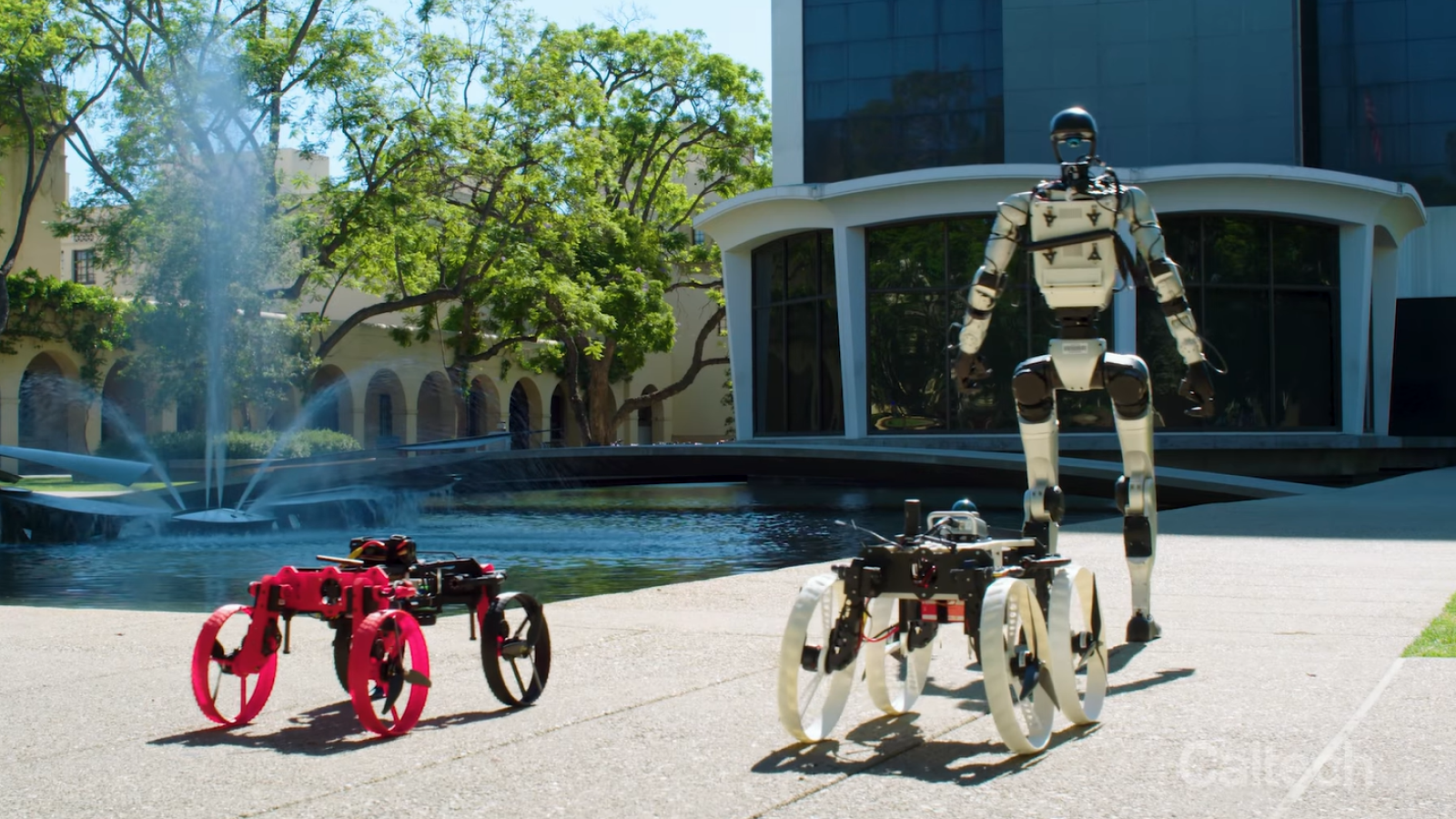
Engineers at the California Institute of Technology have developed a multimodal robotic system, a humanoid robot with a transforming drone that pops out of its back.
The drone, called M4, sits behind a Unitree G1 machine that is a humanoid robot and can transform by switching between driving and flight modes. We’re not talking about Optimus Prime or Megatron here. Rather, the drone-evicting bot resembles Soundwave, a Decepticon with various small drone-like transformers housed in his chest.
you may like
This humanoid can walk (though I’ve seen smoother movements), take on stairs, and head towards where you sent the drone, but at a much slower pace.
“Right now, robots can fly, robots can drive, robots can walk, and all of that is great in certain scenarios,” Aaron Ames, director of CAST and professor of aerospace engineering at Caltech, said in a statement. “But how do you combine these different modes of transportation into one package to maximize the benefits of all of them while mitigating the drawbacks of each?”
The challenge here was how the team could integrate the different robots so that they were one system but provided different capabilities. The drone was built by the CAST team led by Molly Ghalib, and Ames and his lab constructed the humanoid robot.

M4 is able to reconfigure (transform) its body into several different types of behavior. It can assess the environment it needs to penetrate and automatically select the most effective combination of movements to maneuver. M4 can roll on four wheels, use its wheels as rotors to fly, stand on two wheels like a meerkat and use its wheels as legs to “walk,” and use its two rotors to roll up steep slopes and roll toward its destination.
The ability to reuse the M4’s appendages as wheels, legs, and thrusters is an important feature. When the M4 needs to fly, all four wheels fold and the propeller lifts the robot off the ground. That is, you pick it up from behind a humanoid robot that leans forward when deploying the M4.
The overarching goal of the collaboration is to make such autonomous systems safer and more reliable. Ames suggested that if robots are all around us, we need to focus more efforts on making them trustworthy.
“We’re thinking about safety-critical controls, making sure the systems are reliable, making sure they’re safe,” Ames said in a statement. “We have multiple projects beyond this project that study all different aspects of self-government, but these issues are huge. Having these different projects and aspects of collaboration allows us to tackle these much larger issues and really advance self-government in a substantive and collaborative way.”
Source link