The PAVE-SCAN project aims to build an EGNSS-based AI-driven technology to evaluate road pavements with high accuracy and low cost, improving driver safety and road network operation and maintenance.
The maintenance, performance, and safety of road infrastructure are critical concerns for modern society. Increasing traffic volumes, rapid urbanization, and aging infrastructure are increasing the need for efficient and scalable methods to monitor pavement condition. Detecting surface deterioration (cracks, roughness, potholes, deformations, etc.) at an early stage enables timely maintenance, reduces operating costs and increases safety. Traditional inspection approaches, including manual surveys and specialized inspection vehicles, are expensive, labor-intensive, and difficult to perform frequently or across large networks.
PAVE-SCAN and derived PAVE-SENS technology address this challenge through a scalable, low-cost, AI-enabled solution for continuous pavement assessment. Funded by Horizon Europe and supported by the European Union Space Program Agency (EUSPA), the project combines low-cost sensing technologies, GNSS-based positioning, and data-driven analytics to monitor road conditions at high resolution and frequency. By leveraging vehicles already on the road, this project will provide extensive, near real-time insight into pavement health.
PAVE-SCAN aims to evolve beyond traditional inspection technologies and enable public agencies and operators to make informed decisions, optimize maintenance cycles, and enhance network accessibility and safety.
Project purpose
PAVE-SCAN pursues five core objectives:
Develop an integrated hardware and software platform using European GNSS positioning and low-cost sensors (vibration sensors, gyroscopes, OBD units, etc.). It is powered with machine learning and machine vision algorithms for automatic pavement damage detection and classification. Enabling pavement monitoring through participatory data collection utilizing municipal vehicles, road maintenance vehicles, public transport vehicles, and potentially citizen vehicles. Demonstrate and validate the platform through large-scale pilot deployments and reach near market maturity (TRL8-9) by project completion. Provides a system that supports continuous monitoring of your entire network to improve infrastructure planning, safety-focused interventions, and priority maintenance allocation. By increasing the transparency and accessibility of road condition information, we deliver value to local governments, government agencies, transportation operators, and the public.
Significance, innovation and alignment with EU policy
PAVE-SCAN represents a transition from infrequent and expensive surveys to continuous, data-driven pavement management. Its approach is in line with the EU’s digital transformation priorities, in particular:
Driving adoption of GNSS-based technologies (Galileo and EGNOS). Supporting the sustainable development of transportation networks. Improving long-term asset management capabilities. Correct the disparity between municipalities with high and low technological capabilities.
The project’s open architecture design allows for interoperability with existing pavement management systems, integration into municipal digital infrastructure, and potential commercial scale. PAVE-SCAN fosters innovation, entrepreneurship, and smart mobility services by stimulating service-based monitoring models and downstream applications of GNSS and AI.
methodology

This methodology (Figure 1) integrates modern sensing tools with advanced analytics and geographic decision-making frameworks.
GNSS-based positioning and georeferencing
Using European GNSS receivers, sensor observations (such as vehicle vibration signatures) are accurately georeferenced. This is essential to spatially localize defects, correlate anomalies to physical road segments, and support subsequent maintenance operations. Low-cost sensors and participatory sensing
PAVE-SCAN replaces specialized platforms with affordable sensors installed in existing fleets. These include vibration and gyroscope sensors, OBD feeds, and possibly cameras or LiDAR to enable continuous monitoring under real-world operating conditions. Machine learning and machine vision analysis
AI models classify pavement defects, identify roughness patterns, and infer deterioration trends. Modular design allows expansion to new road types, climate regions, or reliability requirements. GIS integration and decision support tools
Detected anomalies are captured into a GIS-based pavement management system that allows you to: Prioritize remediation. Maintenance plans optimized to fit your budget. Dynamic monitoring of degradation over time. Trial introduction as an urban living laboratory
Validation will take place in Cyprus, Malta, Spain, Italy and Estonia. Each location offers unique infrastructure characteristics, vehicle profiles, traffic dynamics, and climate variations, enhancing the transferability and generalizability of our results.
Main achievements and contributions
Work so far on this project has demonstrated the feasibility and disruptive potential of low-cost, crowdsourced pavement monitoring.
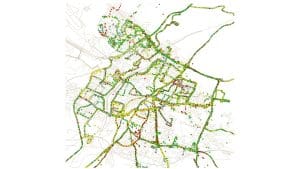
By combining on-board vibration sensors with GNSS positioning and cameras, pavement surface irregularities can be reliably identified. Point-level roadway assessment leads to directional-level and street-level assessment and roadway network mapping (using GIS), complemented with supporting video/imagery, and the underlying ML-processed dataset forms the basis of the pavement management system (Figure 2). Detection of condition degradation correlates well with roughness metrics used in existing pavement management frameworks. Scaling through participatory sensing enables frequent updates at a fraction of the cost of professional surveys. The analysis pipeline transforms raw sensor signals into surface condition index and location-tagged insights suitable for GIS-based infrastructure dashboards and pavement management systems. The pilot implementation will confirm reproducibility across different vehicle types and road environments, and the algorithm will be retrained for continuous improvement.
Further developments will enhance the automation of defect classification through machine vision modules, allowing the use of camera feeds to detect cracks, potholes or frayed surfaces. Parallel work will explore predictive analytics to estimate future deterioration and support scheduling of preventive maintenance rather than reactive repairs.
These advances present clear disruptive potential and demonstrate that low-cost AI-based sensor approaches can meaningfully support municipal maintenance operations.
Outlook and future activities
The PAVE-SCAN platform is moving towards large-scale demonstration and market entry, and future steps include:
The pilot environment contributes a dense ground truth dataset. The system will be progressively installed in municipal vehicles, public transport vehicles and road services departments.
Enhanced Detection Integration of machine vision and multi-sensor fusion extends detection beyond roughness to include visual defects and indicators of structural deterioration. Real-time Monitoring The move from asynchronous data uploads to near-real-time interfaces improves the responsiveness of live asset management. Commercialization This project aims to provide a modular service suitable for municipalities and mobility authorities, outsourced infrastructure management agencies and smart city digital twin environments. Standardization and EU-wide adoption efforts will focus on data governance, privacy practices, interoperability, and harmonized road condition reporting formats.
Consortium and project implementation
The consortium, coordinated by the University of Cyprus, includes 13 partners from seven EU countries and brings together academic institutions, technology providers, transport operators, local authorities and innovation commercialization bodies. This interdisciplinary composition enables a path to superior technology, domain validation, and long-term dissemination.
The project will run from January 2024 to December 2026 and targets ready-to-deploy results through an integrated hardware and software digital platform.
Confirm funding

PAVE-SCAN is funded under the Horizon Europe program (grant agreement number 101131910) with support from EUSPA, with a total budget of approximately EUR 3 million.
This article will be published in an upcoming issue of Special Focus Publication.
Please note: This is a commercial profile
Source link